
Abtract
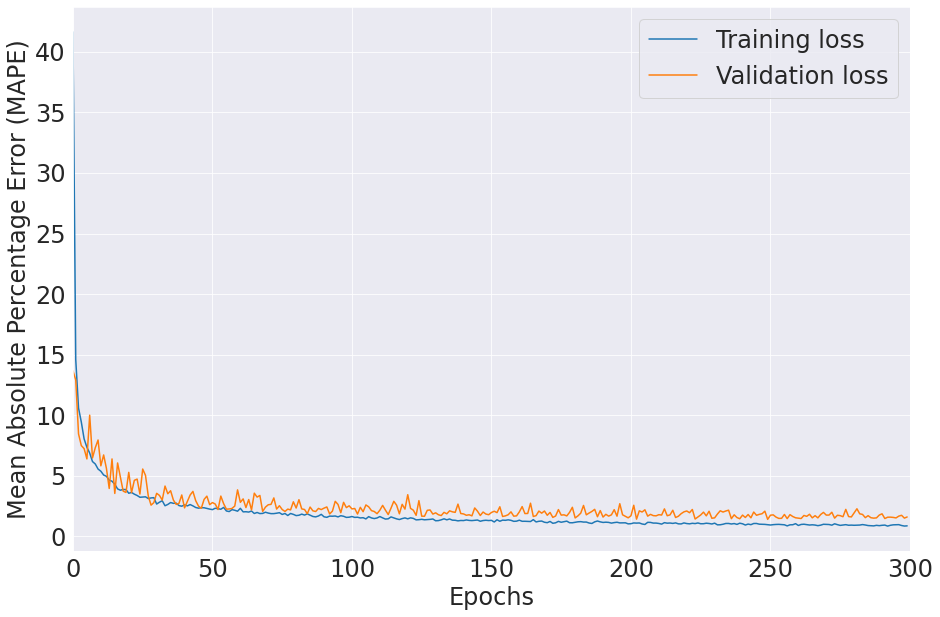
Soil moisture estimation is essential for understanding the water cycle and its impact on weather and climate. GPR based soil moisture estimation is non-invasive in nature and provides quicker results as compared to standard laboratory approaches. Deep learning algorithms have been shown to be an effective method for extracting characteristics from GPR data. To assess soil moisture, this paper offers a deep artificial neural network (ANN) model. The data set was created using finite-difference-time-domain (FDTD) simulation and is used to train and validate the ANN model. The suggested model predicts soil moisture from GPR A-Scans well, with R2 = 0.998 and mean average percentage error (MAPE) of 1.23.
Authors
Nairit Barkataki*, Sharmistha Mazumdar*, Banty Tiru# and Utpal Sarma*
* Dept of Instrumentation & USIC, Gauhati University, Guwahati, India
# Dept of Physics, Gauhati University, Guwahati, India
Note:
This article was published in TRIBES 2021. You may cite the article using the following bibliographic data:
© 2021 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
Contents
Contents
1. Introduction
2. GPR Data
3. Methodology
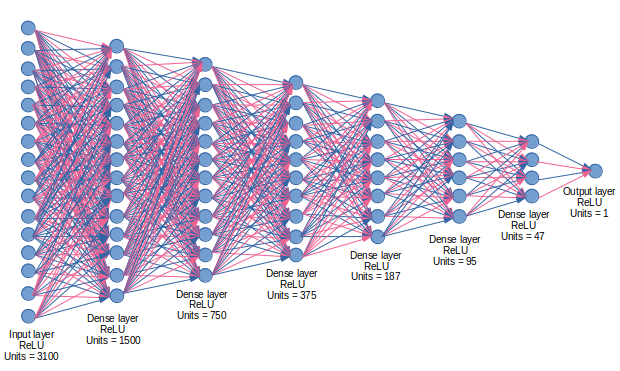
3.1. Proposed model
4. Results
5. Conclusion
6. Acknowledgement
1. Introduction
Soil moisture is considered to be a key variable in environmental studies such as meteorology, hydrology, agriculture and climate change. The estimation of soil moisture provides better understanding of the soil dynamics for making proactive decisions in the field of agriculture.
Soil moisture measurement is generally classified into direct and indirect techniques. Direct methods usually involve digging of holes to collect soil samples and then separating water from the collected samples. The separation of water from soil can be achieved by heating the soil samples or by chemical reactions [1]. These methods gives highly accurate results for a particular depth but they are expensive, time consuming and destructive [2].
Indirect methods mainly involve measurement of physical or chemical properties of soil that are dependent on the amount of soil moisture [1]. Previous studies shows that the electromagnetic (EM) properties of soil is correlated to its moisture content [3]. Time domain reflectrometry (TDR), ground penetrating radar (GPR) and some other techniques use EM properties for measurement of soil moisture.
Calamita et al. studied the variation in soil moisture with soil resistivity in the Vallaccia catchment (central Italy) using portable TDR, along with frequency domain reflectrometer sensors. The results were compared by applying various resistive methods and showed high correlation between resistivity and soil moisture [4]. However, TDR probes limits the depth of investigation to a few meters [5].
Brocca et al. explored the reliability soil moisture estimation from satellite data. Correlation values of relative soil moisture increase upto 0.81 upon application of different filters but decrease with increase in vegetation [6].
Salam et al. developed a real time, in-situ method based on wireless underground communications (WUC) for estimation of soil permittivity and moisture. To obtain highly accurate results, studies were carried out in the frequency range of 100–500 MHz with the antenna buried at 10 cm-40 cm depths in various soils [7].
Compared to TDR, GPR technique has the advantage of giving data from greater spatial regions. GPR has been widely used in sedimentary research [8] and for estimating water content of soil [9][10][11].
GPR is widely used for object size detection [12][13]. However, the size of a target observable with a GPR is dependent on the antenna’s centre frequency [14]. The frequency useful for different applications depends on the soil properties such as soil moisture [2] and soil type [15]. Thus, prior knowledge about the soil moisture content of the soil helps in determining the appropriate frequency to be used for a particular application.
Hubbard et al. examined the potential of estimating soil moisture over large areas with varying hydrological conditions using GPR reflections [16]. Benedetto et al. proposed an approach to estimate soil moisture for pavement inspection using GPR. The results were validated using capacitance probes [17].
However, the interpretation of GPR data is still a manual process. It is done by people who have extensive experience in GPR data interpretation. Of late, machine learning algorithms have been implemented for processing and interpretation of GPR data. Rahman et al. predicted 11 soil series using machine learning techniques in order to find appropriate crops for cultivation [18]. Senanayake et al. developed an neural network model to estimate catchment scale soil moisture fom remote sensing and GPR data [19]. A long short-term memory (LSTM) predictive framework integrated with Boruta-random forest (BRF) optimiser was proposed by Ahmed et al. to estimate soil moisture under global warming scenarios [20]. An SVM model was proposed by Malajner et al. to classify soil types [21]. After determining the soil type, another model for estimating soil moisture was employed. Ultra-wideband radio frequency modules and antennas were used to capture the data. Recently, various regression and machine learning models were proposed by Teneja et al. to predict soil organic matter and soil moisture content using images taken from cell phones [22].
Although various remote sensing techniques are utilised to estimate soil moisture, further research is needed to investigate the feasibility of assessing soil moisture content using GPR. This paper mainly focuses on
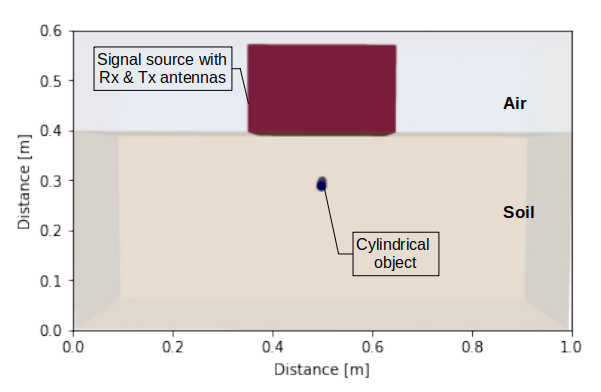
- Creation of a synthetic GPR database for estimation of soil moisture.
- Development of a regression model to estimate soil moisture with a high degree of accuracy.
| S. No. | Permitivity | (S/m) | |
|---|---|---|---|
| 1 | 1% | 3.2343 | 9.9 |
| 2 | 2% | 3.4686 | 18.8 |
| 3 | 3% | 3.7029 | 27.7 |
| 4 | 4% | 3.9372 | 36.6 |
| 5 | 6% | 4.4058 | 54.5 |
| 6 | 7% | 4.6401 | 63.4 |
| 7 | 8% | 4.8744 | 72.3 |
| 8 | 9% | 5.1087 | 81.2 |
| 9 | 10% | 5.343 | 90.1 |
| Sl. No. | Simulation Parameter | Values |
|---|---|---|
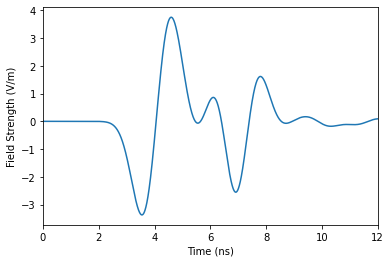
| 1 | Excitation waveform | Gaussian |
| 2 | Frequency used | 400 MHz |
| 3 | Spatial resolution | 2 mm |
| 4 | Time window | 12 ns |
| Sl. No. | True Value (%) | Best Predicted Value (%) | Worst Predicted Value (%) | Median of Predicted Values (%) |
|---|---|---|---|---|
| 1 | 1 | 0.999 | 1.467 | 0.999 |
| 2 | 2 | 2.002 | 1.908 | 1.992 |
| 3 | 3 | 2.999 | 3.451 | 3.008 |
| 4 | 4 | 3.999 | 4.244 | 4.005 |
| 5 | 6 | 6.000 | 6.342 | 6.008 |
| 6 | 7 | 7.001 | 7.355 | 7.009 |
| 7 | 8 | 8.001 | 7.737 | 8.014 |
| 8 | 9 | 8.999 | 9.536 | 9.033 |
| 9 | 10 | 10.000 | 9.488 | 9.927 |
| Metrics | Performance of the ANN model |
|---|---|
| MSE | |
| MAE | 0.00055 |
| MAPE | 1.232291 |
| MSLE | |
| R-squared | 0.998 |
| Sl. No. | Authors | Technique used | Real time/ Offline | |
|---|---|---|---|---|
| 1 | Lee et al. (2018) [24] | Deep neural network applied on remotely sensed satellite data (non-invasive) | Offline | 0.79 |
| 2 | Koley et al. (2020) [25] | Surface soil moisture estimated using LST-NDVI feature space from satellite data (non-invasive) | Offline | 0.8 |
| 3 | Taneja et al. (2021) [22] | Machine learning algorithms applied on soil sample images collected using cell phone. (invasive) | Offline | 0.95 |
| 4 | Present work | ANN applied on GPR data (non-invasive) | Real time | 0.998 |
References
- (2007): Soil sampling and methods of analysis. CRC press, 2007.
- (2016): Ground penetrating radar for underground sensing in agriculture: a review. In: International Agrophysics, vol. 30, no. 4, 2016.
- (2016): Profiles of relative permittivity and electrical conductivity from unsaturated soil water content models. In: Annals of Geophysics, vol. 59, no. 3, pp. 0320, 2016.
- (2012): Electrical resistivity and TDR methods for soil moisture estimation in central Italy test-sites. In: Journal of Hydrology, vol. 454, pp. 101–112, 2012.
- (2008): Soil water content. In: Soil sampling and methods of analysis, pp. 939–962, 2008.
- (2011): Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. In: Remote Sensing of Environment, vol. 115, no. 12, pp. 3390–3408, 2011.
- (2019): Di-Sense: In situ real-time permittivity estimation and soil moisture sensing using wireless underground communications. In: Computer Networks, vol. 151, pp. 31–41, 2019.
- (2004): Ground-penetrating radar and its use in sedimentology: principles, problems and progress. In: Earth-science reviews, vol. 66, no. 3-4, pp. 261–330, 2004.
- (2003): Measuring soil water content with ground penetrating radar: A review. In: Vadose zone journal, vol. 2, no. 4, pp. 476–491, 2003.
- (2018): Measuring soil water content with ground penetrating radar: A decade of progress. In: Vadose Zone Journal, vol. 17, no. 1, pp. 1–9, 2018.
- (2021): Estimating water content of unsaturated sandy soils by GPR during a drainage experiment. In: IOP Conference Series: Earth and Environmental Science, pp. 012018, IOP Publishing 2021.
- (2020): Prediction of Size of Buried Objects using Ground Penetrating Radar and Machine Learning Techniques. In: 2020 International Conference on Computational Performance Evaluation (ComPE), pp. 781-785, IEEE 2020.
- (2020): A machine learning scheme for estimating the diameter of reinforcing bars using ground penetrating radar. In: IEEE Geoscience and Remote Sensing Letters, 2020.
- (2021): Performance investigation of patch and bow-tie antennas for ground penetrating radar applications. In: International Journal of Advanced Technology and Engineering Exploration, vol. 8, no. 79, pp. 753–765, 2021, ISSN: 2394-7454.
- (2021): Classification of soil types from GPR B Scans using deep learning techniques. In: 2021 6th IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT 2021), pp. 840–844, IEEE 2021.
- (2005): Soil moisture content estimation using ground-penetrating radar reflection data. In: Journal of hydrology, vol. 307, no. 1-4, pp. 254–269, 2005.
- (2013): Soil moisture mapping using GPR for pavement applications. In: 2013 7th International Workshop on Advanced Ground Penetrating Radar, pp. 1–5, IEEE 2013.
- (2018): Soil classification using machine learning methods and crop suggestion based on soil series. In: 2018 21st International Conference of Computer and Information Technology (ICCIT), pp. 1–4, IEEE 2018.
- (2021): Estimating catchment scale soil moisture at a high spatial resolution: Integrating remote sensing and machine learning. In: Science of The Total Environment, vol. 776, pp. 145924, 2021.
- (2021): LSTM integrated with Boruta-random forest optimiser for soil moisture estimation under RCP4. 5 and RCP8. 5 global warming scenarios. In: Stochastic Environmental Research and Risk Assessment, pp. 1–31, 2021.
- (2019): Soil type characterization for moisture estimation using machine learning and UWB-Time of Flight measurements. In: Measurement, vol. 146, pp. 537–543, 2019.
- (2021): Multi-algorithm comparison to predict soil organic matter and soil moisture content from cell phone images. In: Geoderma, vol. 385, pp. 114863, 2021.
- (2019): Using deep learning to predict soil properties from regional spectral data. In: Geoderma Regional, vol. 16, pp. e00198, 2019.
- (2018): Estimation of soil moisture using deep learning based on satellite data: A case study of South Korea. In: GIScience & Remote Sensing, vol. 56, no. 1, pp. 43–67, 2018.
- (2020): Estimation and evaluation of high spatial resolution surface soil moisture using multi-sensor multi-resolution approach. In: Geoderma, vol. 378, pp. 114618, 2020, ISSN: 0016-7061.