Authors
Nairit Barkataki*, Sharmistha Mazumdar*, P Bipasha Devi Singha+, Jyoti Kumari+, Banty Tiru# and Utpal Sarma*
* Dept of Instrumentation & USIC, Gauhati University, Guwahati, India
+ Department of Computer Science, Handique Girls’ College, Guwahati, India
# Dept of Physics, Gauhati University, Guwahati, India
Note:
This article was published in RTEICT 2021. You may cite the article using the following bibliographic data:
© 2021 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
Contents
Contents
1. Introduction
2. GPR Data
2.1. Database Creation
2.2. Data preprocessing
3. Methodology
3.1. Hyper-parameters
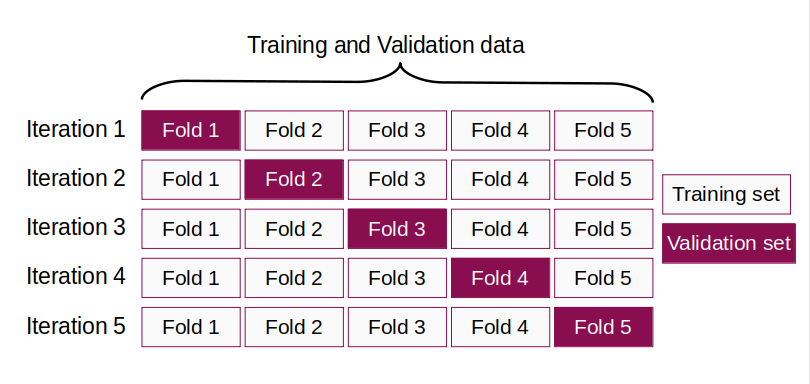
3.2. Cross Validation
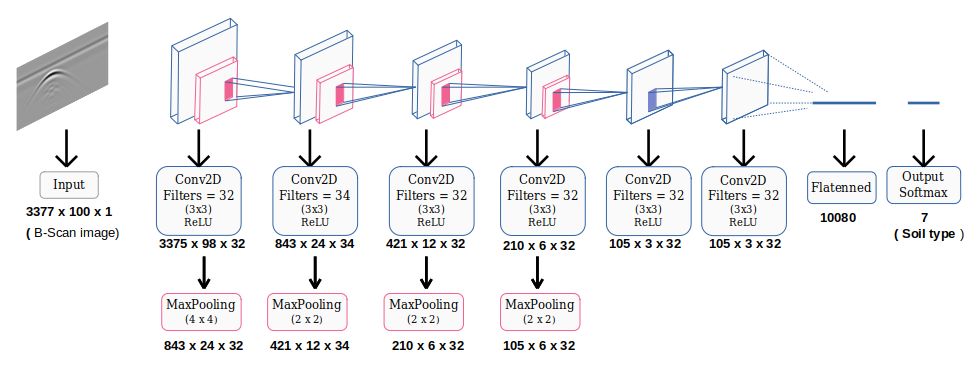
3.3. The proposed model
4. Results
5. Conclusion
5.1. Limitations
5.2. Future Work
6. Acknowledgement
1. Introduction
Soil consists of different materials and change in the composition and proportion of these materials leads to variation in soil properties. Identification of soil types helps in making conscious decisions regarding farming practices. Knowledge about soil is crucial in agro-electronics for development of various instruments.
Traditionally, soil investigations were done by pedologists observing morphological characteristics combined with laboratory measurements. Before any construction work, it is imperative to identify the soil classes upto a certain depth. It gives an estimation of the bearing capacity of the soil. The most basic method to identify soil types is to drill boreholes and test soil samples. However, this is time consuming and expensive.
Therefore, development of simple techniques to measure the properties of soil is of vital importance. Moreover, determination of soil type has applications in electromagnetic (EM) wave propagation analysis, subsurface imaging etc. Classification of soil type is sometimes done on the basis of soil permittivity and moisture estimation. There are different methods for this which include time-domain reflectometry (TDR) [1], ground-penetrating radar (GPR) measurements [2], and remote sensing [3].
Non-invasive methods for soil classification and analysis are essential for quick and reliable results. Salam et al. developed a method for real-time in-situ estimation of soil properties (relative permittivity and moisture) using underground transmitter and receiver link in wireless underground communications (WUC) [4]. Teng et al. proposed a method for soil classification of using visible–near infrared (vis–NIR) spectroscopy, and digital soil class mapping (DSM) [5].
Karim et al. studied on the soil profiles in Moramo River Basin using images from ALOS AVNIR-2 (satellite images) and identification of 11 soil subgroups were done [6]. However, remote sensing methods are limited to depths of 20-30 cms.
However, the classification procedure is manual in most cases and requires expertise. It is also time consuming and sometimes subjective. Hence, there is a need to automate this procedure. This is where machine learning comes into the picture [7]. Rahman et al. used soil samples collected from Khulna district, Bangladesh and proposed a machine learning model to predict 11 soil series along with land type (class) to identify suitable crop for cultivation [8].
Post processing of GPR data is dependant on the soil type of the survey area. In addition to the operating frequency of the system [9], soil with high conductivity limits the depth of investigation and diminishes the subsurface features [10].
Relative permittivity and conductivity of soil changes with soil types and specific terrain conditions i.e. moisture, vegetation and compactness [11]. As a non-destructive method, GPR can be used to determine soil types based on their properties like permittivity, conductivity, soil water content, texture etc. GPR uses electromagnetic waves and measures the reflections caused due to changes in electromagnetic properties of the subsurface environment [12]. Liu et al. used GPR to determine soil characteristics and crop root measurements [13].
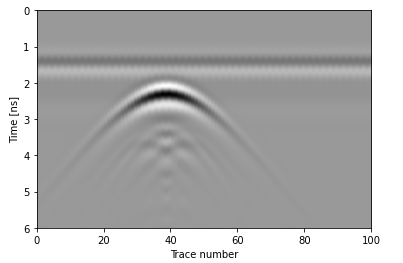
The reflections measured by a GPR, also known as radargrams, are hyperbolic patterns which depend on the electromagnetic properties of the subsurface. Hyperbolic signatures are used in object detection. Lei et al. proposed a deep learning framework to detect hyperbolic signatures from B-Scan images identify buried object by localising hyperbolic regions [14].
Takahashi et al. characterised the electromagnetic properties of four soil types using laboratory based methods. Test beds were prepared using the 4 soil types where metal pieces along with bullets, cartridges and landmines were buried and GPR data was collected. Their study concluded that soil properties clearly affected the detection rates of buried objects [15].
Shihab et al. applied curve fitting procedures to estimate the radius of subsurface cylindrical objects. They also concluded that accurate estimation of relative permittivity was possible by analysing the radargrams from cylinders of varying radii [16]. Mechbal et al. applied post processing on raw GPR data to determine the size of concrete rebars [17] while others used machine learning techniques for detecting landmines [18] and estimating the size of buried objects [19].
Aim of Present Work
Although many remote sensing techniques are used for soil classification and identification of soil properties, more work needs to be done to explore the possibility of classifying soil types based on GPR data. This paper mainly focuses on- Creation of a synthetic GPR database for use in classification of 7 different soil types.
- Development of a deep learning model to classify the above 7 different soil types with a high degree of accuracy.
| Sl. No. | Soil Type | Class | permitivity | (S/m) |
|---|---|---|---|---|
| 1 | Dry, sandy, flat (coastal) | Soil Type 1 | 10 | 0.002 |
| 2 | Marshy, forested, flat | Soil Type 2 | 12 | 0.008 |
| 3 | (to about 1000 m) | Soil Type 3 | 5 | 0.001 |
| 4 | Pastoral Hills, rich soil | Soil Type 4 | 17 | 0.007 |
| 5 | and forestation | Soil Type 5 | 13 | 0.005 |
| 6 | (low hills) | Soil Type 6 | 15 | 0.01 |
| 7 | Rocky land, steep hills | Soil Type 7 | 12.5 | 0.002 |
| Sl. No. | Parameters | Values |
|---|---|---|
| 1 | Excitation Waveform type | Gaussian |
| 2 | Frequency | 1500 MHz |
| 3 | Spatial Resolution | 2mm |
| 4 | A-Scans interval | 5mm |
| 5 | Number of A-Scans | 100 |
| Sl. no. | (ns) | |
|---|---|---|
| 1 | 5 | 7 |
| 2 | 10 | 9 |
| 3 | 12, 12.5, 13 | 10 |
| 4 | 15, 17 | 11 |
| Sl. No. | Hidden Layers | Score |
|---|---|---|
| 1 | 3 Layers | 74.82% |
| 2 | 4 Layers | 93.90% |
| 3 | 5 Layers | 96.97% |
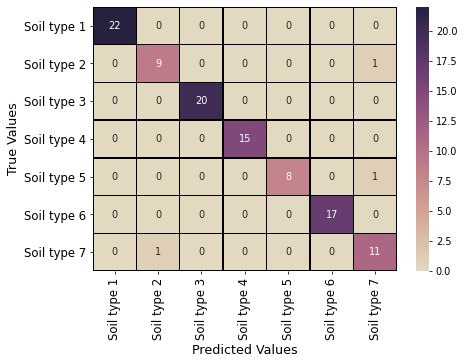
| Soil Type | precision | f1-score | recall | accuracy |
|---|---|---|---|---|
| Soil type 1 | 1.00 | 1.00 | 1.00 | |
| Soil type 2 | 0.90 | 0.90 | 0.90 | |
| Soil type 3 | 1.00 | 1.00 | 1.00 | |
| Soil type 4 | 1.00 | 1.00 | 1.00 | 0.97 |
| Soil type 5 | 1.00 | 0.94 | 0.89 | |
| Soil type 6 | 1.00 | 1.00 | 1.00 | |
| Soil type 7 | 0.85 | 0.88 | 0.92 |
| Sl. No. | Authors | Technique used | Non Invasive | Accuracy |
|---|---|---|---|---|
| 1 | (2017) [22] | SVM based model used to classify soil types. Soil samples collected using hand boring and tested in laboratory | Invasive | 82% |
| 2 | (2018) [8] | SVM based model used to classify soil types from soil series data obtained from laboratory measurements | Invasive | 94% |
| 3 | (2020) [23] | CNN based model used to classify pictures of soil samples | Non Invasive | 77% |
| 4 | Present work | CNN based model used to classify soil types from GPR data | Non Invasive | 97% |
- Generating more data using different soil properties and for different target materials.
- Implementing the proposed model on real data.
References
- (2012): Estimation of electromagnetic properties in soil testbeds using frequency and time domain modeling. In: IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 5, no. 3, pp. 984–989, 2012.
- (2015): Permittivity estimation using coupling of commercial ground penetrating radars. In: IEEE Transactions on Geoscience and Remote Sensing, vol. 53, no. 8, pp. 4157–4164, 2015.
- (2016): Validation of GPS-IR soil moisture retrievals: Comparison of different algorithms to remove vegetation effects. In: IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 9, no. 10, pp. 4759–4770, 2016.
- (2019): Di-Sense: In situ real-time permittivity estimation and soil moisture sensing using wireless underground communications. In: Computer Networks, vol. 151, pp. 31–41, 2019.
- (2018): Updating a national soil classification with spectroscopic predictions and digital soil mapping. In: Catena, vol. 164, pp. 125–134, 2018.
- (2020): The Rapid Method of Soil Identification Based on Remote Sensing and Geographic Information Systems (Case Study of Moramo Watershed). In: Land Science, vol. 2, no. 2, pp. p12–p12, 2020.
- (2006): Machine learning in soil classification. In: Neural networks, vol. 19, no. 2, pp. 186–195, 2006.
- (2018): Soil classification using machine learning methods and crop suggestion based on soil series. In: 2018 21st International Conference of Computer and Information Technology (ICCIT), pp. 1–4, IEEE 2018.
- (2021): Performance investigation of patch and bow-tie antennas for ground penetrating radar applications. In: International Journal of Advanced Technology and Engineering Exploration, vol. 8, no. 79, pp. 753–765, 2021, ISSN: 2394-7454.
- (1995): Use of soil information to determine application of ground penetrating radar. In: Journal of applied geophysics, vol. 33, no. 1-3, pp. 101–108, 1995.
- (2019): Modeling and measurement of complex permittivity of soils in UHF. In: IEEE Geoscience and Remote Sensing Letters, vol. 17, no. 7, pp. 1109–1113, 2019.
- (2013): Histograms of oriented gradients for landmine detection in ground-penetrating radar data. In: IEEE transactions on geoscience and remote sensing, vol. 52, no. 3, pp. 1539–1550, 2013.
- (2016): Ground penetrating radar for underground sensing in agriculture: a review. In: International Agrophysics, vol. 30, no. 4, 2016.
- (2019): Automatic hyperbola detection and fitting in GPR B-scan image. In: Automation in Construction, vol. 106, pp. 102839, 2019.
- (2011): Soil properties and performance of landmine detection by metal detector and ground-penetrating radar—Soil characterisation and its verification by a field test. In: Journal of Applied Geophysics, vol. 73, no. 4, pp. 368–377, 2011.
- (2005): Radius estimation for cylindrical objects detected by ground penetrating radar. In: Subsurface sensing technologies and applications, vol. 6, no. 2, pp. 151–166, 2005.
- (2017): Determination of concrete rebars characteristics by enhanced post-processing of GPR scan raw data. In: NDT & E International, vol. 89, pp. 30–39, 2017.
- (2020): Target detection using supervised machine learning algorithms for GPR data. In: Sensing and Imaging, vol. 21, no. 1, pp. 1–15, 2020.
- (2020): Prediction of Size of Buried Objects using Ground Penetrating Radar and Machine Learning Techniques. In: 2020 International Conference on Computational Performance Evaluation (ComPE), pp. 781-785, IEEE 2020.
- (2016): gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. In: Computer Physics Communications, vol. 209, pp. 163–170, 2016.
- (2019): Using deep learning to predict soil properties from regional spectral data. In: Geoderma Regional, vol. 16, pp. e00198, 2019.
- (2017): Comparison of machine learning algorithms for soil type classification. In: 2017 3rd International Conference on Science and Technology-Computer (ICST), pp. 7–10, IEEE 2017.
- (2020): Artificial intelligence system for supporting soil classification. In: Results in Engineering, vol. 8, pp. 100188, 2020.

Quiet interesting work done but my issue is would the f1 score for soil type 7 reflects the f1 score for soil type 5 since according to the confusion matrix it reflects that the soil type 5 was incorrectly classified as soil type 7 and what could be the reason as to why those soil types where misclassified as 7 but not any other soil type otherwise cudos for the great work done Sir
Hi Robert,
F1-score for soil type 7 and soil type 5 are calculated separately. The score is dependent on the respective Precision and Recall values and hence the F1-scores for different soil types will be different.
Coming to your second point, the permittivity values of soil type 7 and 5 are very close to each other. The reflected EM waves have different characteristics for different values of permittivity and conductivity. Soil type 2 is considered to have the same permittivity value as soil type 7. Hence there is misclassifications within these 3 types of soil.